- Форум
- Stealth PCM
- Настройка, ПО (software)
- Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
- alexander
-
 Автор темы
Автор темы
- CEO
-

Меньше
Подробнее
4 года 5 мес. назад - 4 года 5 мес. назад #26
от alexander
Описание системы
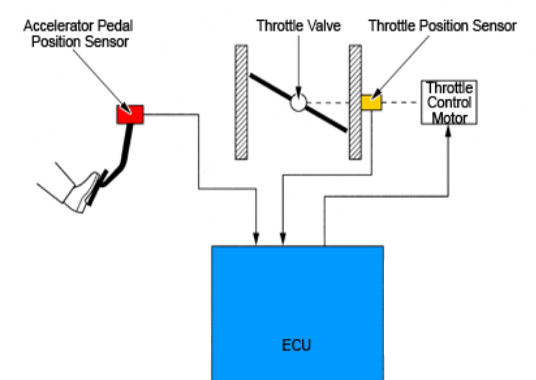
Система электронной дроссельной заслонки состоит из:
датчика положения педали (PPS),
датчика положения заслонки (TPS),
и двигателя постоянного тока, который поворачивает заслонку.
В системах toyota первого поколения (с тросиком) есть так же магнитное сцепление - дополнительный элемент, позволяющий аварийно отключить механическую связь двигателя с заслонкой, но принципы управления и алгоритмы положением заслонки от этого не меняются.
Каждый датчик положения имеет два канала для дублирования, и определения неисправности датчика при любом его положении.
Особенностью механической реализации любой заслонки является то, что если максимально до упора открыть заслонку, то она способна повернуться немного больше чем требуется для полного открытия (наоборот даже немного закроет поток воздуха) - это очень полезное свойство, которое способно сберечь мотор дросселя от перегрева при полном открытии, но заслонку при этом очень важно правильно откалибровать.
Блок управления непрерывно отслеживает положение заслонки, сверяет его с желаемым положением дросселя, и если есть отклонения, то увеличивает или уменьшает ток, подаваемый на мотор.
Про перегрев мотора
Несмотря на то, что мотор дроссельной заслонки работает на том же напряжении, что и все остальные устройства (14 Вольт), если непрерывно подать на него такое напряжение, то спустя непродолжительное время он может просто сгореть.
При нормальном управлении заслонкой этого никогда не происходит.
Но если представить ситуацию, что при открытии заслонки до упора, блок управления "видит" не полное открытие, а например 90%. А водитель при этом полностью выжал педаль, и просит дроссель открыться на 100%, то регулятор в блоке управления будет только увеличивать ток на моторе, не зная что заслонка уже открыта максимально. И такое бесконтрольное увеличение тока может привести мотор к выходу из строя.
Так что очень важно, чтоб блок управления мог "видеть" несколько больше чем 100% диапазон положения заслонки. тогда в случае если заслонка повернется больше 100% (перерегулирование), он снизит ток, чтоб вернуть заслонку в заданное положение.
Система электронной дроссельной заслонки состоит из:
датчика положения педали (PPS),
датчика положения заслонки (TPS),
и двигателя постоянного тока, который поворачивает заслонку.
В системах toyota первого поколения (с тросиком) есть так же магнитное сцепление - дополнительный элемент, позволяющий аварийно отключить механическую связь двигателя с заслонкой, но принципы управления и алгоритмы положением заслонки от этого не меняются.
Каждый датчик положения имеет два канала для дублирования, и определения неисправности датчика при любом его положении.
Особенностью механической реализации любой заслонки является то, что если максимально до упора открыть заслонку, то она способна повернуться немного больше чем требуется для полного открытия (наоборот даже немного закроет поток воздуха) - это очень полезное свойство, которое способно сберечь мотор дросселя от перегрева при полном открытии, но заслонку при этом очень важно правильно откалибровать.
Блок управления непрерывно отслеживает положение заслонки, сверяет его с желаемым положением дросселя, и если есть отклонения, то увеличивает или уменьшает ток, подаваемый на мотор.
Про перегрев мотора
Несмотря на то, что мотор дроссельной заслонки работает на том же напряжении, что и все остальные устройства (14 Вольт), если непрерывно подать на него такое напряжение, то спустя непродолжительное время он может просто сгореть.
При нормальном управлении заслонкой этого никогда не происходит.
Но если представить ситуацию, что при открытии заслонки до упора, блок управления "видит" не полное открытие, а например 90%. А водитель при этом полностью выжал педаль, и просит дроссель открыться на 100%, то регулятор в блоке управления будет только увеличивать ток на моторе, не зная что заслонка уже открыта максимально. И такое бесконтрольное увеличение тока может привести мотор к выходу из строя.
Так что очень важно, чтоб блок управления мог "видеть" несколько больше чем 100% диапазон положения заслонки. тогда в случае если заслонка повернется больше 100% (перерегулирование), он снизит ток, чтоб вернуть заслонку в заданное положение.
Последнее редактирование: 4 года 5 мес. назад пользователем alexander.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- alexander
-
Автор темы
- CEO
-
4 года 5 мес. назад - 1 мес. 4 нед. назад #27
от alexander
alexander ответил в теме Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Термины
Источники нелинейности в управлении положением заслонки
Когда заслонка находится в отключенном состоянии, она не закрыта полностью. У неё имеется некоторое "домашнее состояние" при котором заслонка немного приоткрыта, как правило это положение соответствует чуть большему положению чем положение при холостых оборотах. В домашнем положении её удерживают две пружины, направленные встречно. Поэтому чтобы сдвинуть заслонку с любого из этих положении, нужно преодолеть момент преднатяга пружин (Spring preload) момент преднатяга в сторону закрытия и открытия заслонки может отличаться.
Кроме этого другим сильным источником нелинейности является момент трения покоя(Frictional torque). Он возникает когда заслонка неподвижна. Чтоб сменить положение заслонки, требуется подать бОльшее управляющее воздействие, а как только заслонка пришла в движение, это воздействие необходимо уменьшить, чтоб не возникало перерегулирования или в худшем случае колебательного процесса.
Параметры управления
Для того чтобы получить доступ (на прошивках ранее 0019 версии) к выводу параметров системы управления электронной дроссельной заслонкой, необходимо зайти в свойства проекта (File -> Project Properties) и на вкладке Settings выбрать DRIVE_BY_WIRE_INDICATORS Activated.
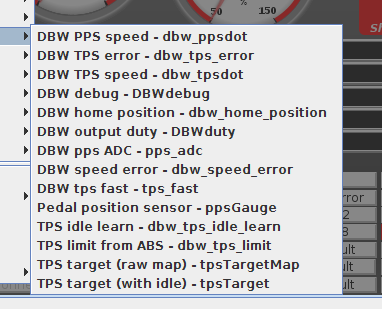
PPS speed (так же может упоминаться как PPS dot) - скорость изменения положения педали акселератора
TPS error (ошибка положения заслонки) - разница между реальным положением заслонки и желаемым
TPS speed (так же может упоминаться как TPS dot) - скорость изменения положения заслонки
home position - свободное положение заслонки. Автоматически считывается в момент включения блока управления, до подачи тока на мотор заслонки.
output duty - скважность управляющих импульсов на двигатель заслонки. Показатель может принимать отрицательные значения - это оначает инвертированную полярность для закрытия заслонки.
PPS ADC - сырое значения с АЦП датчика положения заслонки (от 0 до 1024)
Pedal position sensor - положение педали акселератора (PPS)
TPS limit from ABS - ограничение положения заслонки со стороны блока TRC/ABS
TPS target (raw map) - желаемое значение заслонки (по карте, без учета хх)
TPS target (plus idle) - желаемое значение заслонки (предыдущее + положение хх)
Алгоритм позиционирования заслонки будет стремиться удерживать угол положения в соответсвии со значением последнего параметра из этого списка.
Источники нелинейности в управлении положением заслонки
Когда заслонка находится в отключенном состоянии, она не закрыта полностью. У неё имеется некоторое "домашнее состояние" при котором заслонка немного приоткрыта, как правило это положение соответствует чуть большему положению чем положение при холостых оборотах. В домашнем положении её удерживают две пружины, направленные встречно. Поэтому чтобы сдвинуть заслонку с любого из этих положении, нужно преодолеть момент преднатяга пружин (Spring preload) момент преднатяга в сторону закрытия и открытия заслонки может отличаться.
Кроме этого другим сильным источником нелинейности является момент трения покоя(Frictional torque). Он возникает когда заслонка неподвижна. Чтоб сменить положение заслонки, требуется подать бОльшее управляющее воздействие, а как только заслонка пришла в движение, это воздействие необходимо уменьшить, чтоб не возникало перерегулирования или в худшем случае колебательного процесса.
Параметры управления
Для того чтобы получить доступ (на прошивках ранее 0019 версии) к выводу параметров системы управления электронной дроссельной заслонкой, необходимо зайти в свойства проекта (File -> Project Properties) и на вкладке Settings выбрать DRIVE_BY_WIRE_INDICATORS Activated.
PPS speed (так же может упоминаться как PPS dot) - скорость изменения положения педали акселератора
TPS error (ошибка положения заслонки) - разница между реальным положением заслонки и желаемым
TPS speed (так же может упоминаться как TPS dot) - скорость изменения положения заслонки
home position - свободное положение заслонки. Автоматически считывается в момент включения блока управления, до подачи тока на мотор заслонки.
output duty - скважность управляющих импульсов на двигатель заслонки. Показатель может принимать отрицательные значения - это оначает инвертированную полярность для закрытия заслонки.
PPS ADC - сырое значения с АЦП датчика положения заслонки (от 0 до 1024)
Pedal position sensor - положение педали акселератора (PPS)
TPS limit from ABS - ограничение положения заслонки со стороны блока TRC/ABS
TPS target (raw map) - желаемое значение заслонки (по карте, без учета хх)
TPS target (plus idle) - желаемое значение заслонки (предыдущее + положение хх)
Алгоритм позиционирования заслонки будет стремиться удерживать угол положения в соответсвии со значением последнего параметра из этого списка.
Последнее редактирование: 1 мес. 4 нед. назад пользователем AbZex.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- alexander
-
Автор темы
- CEO
-
4 года 5 мес. назад #28
от alexander
alexander ответил в теме Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Описание параметров настройки электронной дроссельной заслонки
Все основные параметры настройки системы Drive-by-wire находятся в разделе Startup/Idle
Drive-by-wire settings
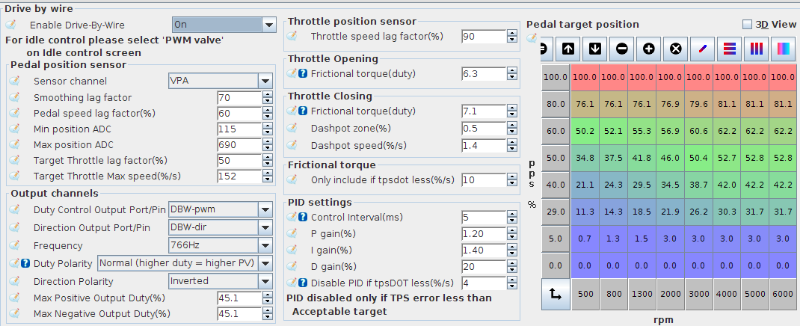
Pedal position sensor
Sensor channel - выбор аналогового канала датчика положения педали
Smoothing lag factor - сглаживание аналогового сигнала (фильтр) чем ниже значение, тем сильнее сглаживание. 100% - отключено.
Pedal speed lag factor - сглаживание показателя PPS speed
MIN - MAX position ADC - значения АЦП для минимального и максимального положений педали (0% и 100%)
Target throttle lag factor - сглаживание желаемого значения положения заслонки
Target throttle max speed - максимальная скорость изменения желаемого положения заслонки
Output channels
Duty control output port - всегда должно стоять DBW-pwm
Direction output port - всегда должно стоять DBW-dir
Direction polarity - полярность двигателя. Если положительный output duty приводит к закрытию заслонки, а отрицательный - к открытию, то необходимо сменить здесь полярность на противоположную.
Max positive/negative output duty - максимально возможная скважность на открытие/закрытие заслонки. Одновременно ограничивает скорость заслонки и максимальный ток, подаваемый на неё.
Throttle position sensor
Throttle speed lag factor] - сглаживание параметра TPS speed
Throttle opening
Frictional torque - скважность выходного сигнала на компенсацию момента трения покоя при положениях заслонки больше чем "домашнее" положение
Throttle closing
Frictional torque - скважность выходного сигнала на компенсацию момента трения покоя при положениях заслонки меньше чем "домашнее" положение
Dashpot zone - зона плавного закрытия заслонки. Если задать этот параметр, то после нажатия педали газа и последующего отпускания, желаемое положение заслонки не сразу вернется на положение хх, а сначала на положение хх + это значение, а после плавно опустится до значения хх со скоростью, указываемой в следующем параметре.
Dashpot speed - скорость плавного закрытия. Чем меньше значение, тем плавнее. Позволяет избежать провала оборотов при отпускании газа.
Frictional torque
only include if TPSdot less - значение TPSdot, ниже которого учитывается момент трения покоя.
PID Settings
Параметры ПИД-регулятора
DBW Acceptable target error
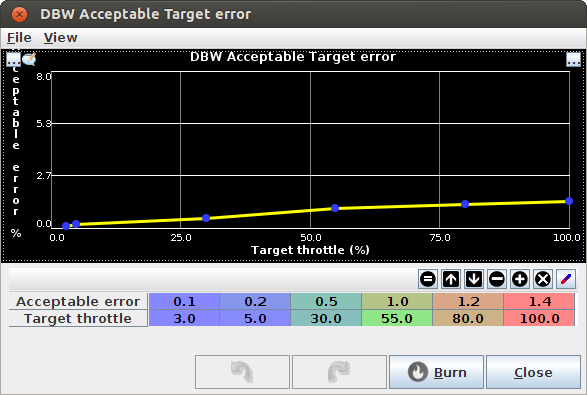
Желаемая точность позиционирования заслонки в зависимости от желаемого положения
DBW Spring preload duty
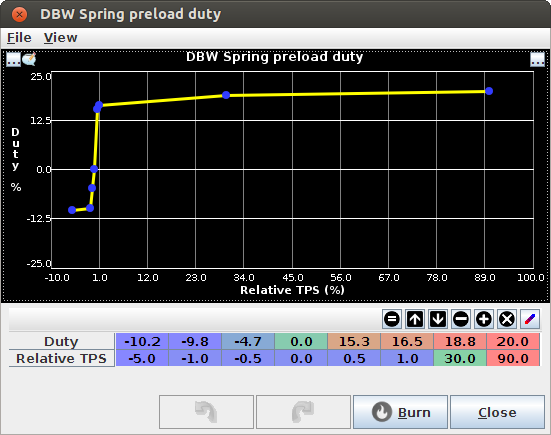
Скважность регулятора на преодоления преднатяга пружин.
Ось TPS относительная - 0 это "домашнее положение", скважность в этой точке всегда 0. положительные значения - "выше" домашнего положения, отрицательные - "ниже".
Все основные параметры настройки системы Drive-by-wire находятся в разделе Startup/Idle
Drive-by-wire settings
Smoothing lag factor - сглаживание аналогового сигнала (фильтр) чем ниже значение, тем сильнее сглаживание. 100% - отключено.
Pedal speed lag factor - сглаживание показателя PPS speed
MIN - MAX position ADC - значения АЦП для минимального и максимального положений педали (0% и 100%)
Target throttle lag factor - сглаживание желаемого значения положения заслонки
Target throttle max speed - максимальная скорость изменения желаемого положения заслонки
Direction output port - всегда должно стоять DBW-dir
Direction polarity - полярность двигателя. Если положительный output duty приводит к закрытию заслонки, а отрицательный - к открытию, то необходимо сменить здесь полярность на противоположную.
Max positive/negative output duty - максимально возможная скважность на открытие/закрытие заслонки. Одновременно ограничивает скорость заслонки и максимальный ток, подаваемый на неё.
Dashpot zone - зона плавного закрытия заслонки. Если задать этот параметр, то после нажатия педали газа и последующего отпускания, желаемое положение заслонки не сразу вернется на положение хх, а сначала на положение хх + это значение, а после плавно опустится до значения хх со скоростью, указываемой в следующем параметре.
Dashpot speed - скорость плавного закрытия. Чем меньше значение, тем плавнее. Позволяет избежать провала оборотов при отпускании газа.
DBW Acceptable target error
Желаемая точность позиционирования заслонки в зависимости от желаемого положения
DBW Spring preload duty
Скважность регулятора на преодоления преднатяга пружин.
Ось TPS относительная - 0 это "домашнее положение", скважность в этой точке всегда 0. положительные значения - "выше" домашнего положения, отрицательные - "ниже".
Вложения:
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- alexander
-
Автор темы
- CEO
-
4 года 5 мес. назад - 4 года 5 мес. назад #29
от alexander
alexander ответил в теме Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Калибровка датчиков положения педали и заслонки
В большинстве случаев, настройка всех "сложных" параметров электронной заслонки не требуется. Достаточно воспользоваться базовыми значениями для конкретного дросселя, и скорее всего с ними система будет работать корректно. Однако индивидуальная калибровка датчиков положения необходима - так как паказатели этих датчиков могут существенно отличаться на двух одинаковых с виду заслонках.
Кроме этого может потребоваться индивидуальная настройка 3х мерной карты Target position, чтоб обеспечить желаемое значение комфортности/резкости заслонки, а так же параметров dashpot zone.
Калибровка датчика положения педали
Если с отпущенной педалью датчик показывает 110, вписать в minADC 115.
В этом случае, когда педаль отпущена, параметр Pedal position sensor будет принимать значения чуть ниже 0%. Это позволит при небольших колебаниях показаний в дальнейшем, не выходить за пределы 0% при отпущенной педали, что необходимо для корректной работы алгоритмов ХХ.
После калибровки Вывести на панель параметр Drive by wire -> Pedal position sensor и проверить чтоб он показывал от ~ -1% с отпущенной педалью и ~100% с полностью нажатой.
В большинстве случаев, настройка всех "сложных" параметров электронной заслонки не требуется. Достаточно воспользоваться базовыми значениями для конкретного дросселя, и скорее всего с ними система будет работать корректно. Однако индивидуальная калибровка датчиков положения необходима - так как паказатели этих датчиков могут существенно отличаться на двух одинаковых с виду заслонках.
Кроме этого может потребоваться индивидуальная настройка 3х мерной карты Target position, чтоб обеспечить желаемое значение комфортности/резкости заслонки, а так же параметров dashpot zone.
Калибровка датчика положения педали
- Для калибровки двигатель должен быть заглушен, зажигание включено, Tuner Studio подключена.
- Вывести на панель параметр Drive by wire -> DBW pps ADC
- Открыть окно Drive-by-wire Settings, так чтоб было видно индикатор DBW pps ADC
- Нажать педаль до упора, и вписать значение датчика в поле Pedal position sensor -> Max ADC
- Отпустить педаль, и вписать значение датчика + 5 в поле Pedal position sensor -> Min ADC
Если с отпущенной педалью датчик показывает 110, вписать в minADC 115.
В этом случае, когда педаль отпущена, параметр Pedal position sensor будет принимать значения чуть ниже 0%. Это позволит при небольших колебаниях показаний в дальнейшем, не выходить за пределы 0% при отпущенной педали, что необходимо для корректной работы алгоритмов ХХ.
После калибровки Вывести на панель параметр Drive by wire -> Pedal position sensor и проверить чтоб он показывал от ~ -1% с отпущенной педалью и ~100% с полностью нажатой.
Последнее редактирование: 4 года 5 мес. назад пользователем alexander.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- alexander
-
Автор темы
- CEO
-
4 года 5 мес. назад - 4 года 5 мес. назад #30
от alexander
alexander ответил в теме Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Калибровка датчика положения заслонки
Откалибровать датчик положения заслонки можно двумя способами:
1. более точный - требуется демонтаж патрубка около дросселя, чтоб была возможность вручную повернуть заслонку.
2. быстрый способ
Калибровка ДПДЗ - точный способ
Демонтировать патрубок около дросселя, чтоб была возможность повернуть заслонку рукой
Включить зажигание, открыть проект в Tuner Studio
Открыть окно Drive-by-wire Settings, в настройках Output channels установить оба параметра Max Duty = 0, это приведет к отключению мотора заслонки (запомнить какие значения стояли - их в конце процедуры придется вернуть обратно)
Открыть окно Tools - Calibrate TPS (расположено сверху, в основном меню)
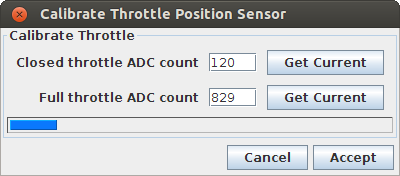
Вручную полностью закрыть заслонку, и с закрытой заслонкой нажать на верхнюю кнопку Get current
В поле Closed throttle ADC появится новое значение. Прибавить к нему 3. (если например было 117, указать 120)
Вручную полностью открыть заслонку, и с открытой заслонкой нажать на нижнюю кнопку Get current
При открытии заслонки очень важно открыть её не до упора (в положении до упора она уже начинает обратно закрываться), а удерживать в положении, когда заслонка становится ровно вдоль потока.
Нажать кнопку Accept. Окно закроется, после этого необходимо выключить зажигание, и включить снова, чтоб обновить параметр DBW home position (он считывается при включении зажигания)
Вернуть обратно параметры Max Duty в окне Drive-by-wire Settings - мотор включится
Нажать педаль газа полностью и проверить что заслонка поворачивается ровно параллельно потоку, не больше. После этого можно собрать обратно впуск
Откалибровать датчик положения заслонки можно двумя способами:
1. более точный - требуется демонтаж патрубка около дросселя, чтоб была возможность вручную повернуть заслонку.
2. быстрый способ
Калибровка ДПДЗ - точный способ
Вложения:
Последнее редактирование: 4 года 5 мес. назад пользователем alexander.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- alexander
-
Автор темы
- CEO
-
4 года 5 мес. назад #31
от alexander
alexander ответил в теме Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Калибровка ДПДЗ - быстрый способ
Этот способ быстрый не только потому, что не требует разбора впускной системы, но и потому, что некоторые этапы, следует проходить быстро, чтоб не перегружать мотор дроссельной заслонки.
Включить зажигание, открыть проект в Tuner Studio
Открыть окно Drive-by-wire Settings, в настройках Output channels уменьшить оба параметра Max Duty до 35, это приведет к снижению максимального тока на мотора заслонки (запомнить какие значения стояли - их в конце процедуры придется вернуть обратно)
Вывести на панель индикатор Drive by wire - DBW output duty
Открыть карту Startup/Idle - Idle Cranking Duty (прошивки до 0007), Startup/Idle - Idle Starting Duty - Crank Position (прошивки c 0007), и указать нулевые значения на всех температурах (запомнить значения, их потом придется вернуть обратно)
Этот пункт необходимо сделать, чтоб получить полностью закрытое положение заслонки (без приоткрытия на холостой ход)
Открыть окно Tools - Calibrate TPS (расположено сверху, в основном меню), расположить его так, чтоб было видно индикатор DBW output duty
Нажать педаль газа примерно на половину (не обязательно точно середину держать. достаточно чтоб это были не крайние положения. Вручную указать 0 в поле Closed throttle ADC и 1023 в поле Full throttle ADC и нажать кнопку Accept
С этого момента если полностью отпустить педаль, или полностью нажать педаль, заслонка повернется до упора и значение DBW output duty примет крайние значение (-35 либо 35)
Снова открыть Tools - Calibrate TPS, и с отпущенной педалью дождаться когда duty станет -35, и нажать верхнюю кнопкуGet Current - прибавить к полученному значению цифру 3 (например если было 117, указать 120)
Нажать педаль газа до упора, дождаться когда duty станет 35, и положение заслонки (синяя шкала) достигнет какого-то фиксированного уровня. Нажать нижнюю кнопку Get current, и от полученного значения отнять 25. (например если полученное значение было 848, указываем 823.
Нажимает Accept и перезапускаем зажигание. (чтоб обновить параметр DBW home position)
Возвращем обратно параметры Max Duty в разделе Drive-by-wire settings и карту Cranking Position / Duty
Проверяем что при нажатии педали газа до упора показатель DBW output duty не держится на максимальном значении при открытой полностью заслонке
Этот способ быстрый не только потому, что не требует разбора впускной системы, но и потому, что некоторые этапы, следует проходить быстро, чтоб не перегружать мотор дроссельной заслонки.
Вложения:
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- Форум
- Stealth PCM
- Настройка, ПО (software)
- Настройка и калибровка электронного дросселя (Drive-by-wire, ETCS-i, и т.д.)
Время создания страницы: 0.085 секунд